Project Overview
The embedded project demonstrates a CAN bus TX/RX communication using ESP32 microcontrollers paired with SN65HVD230 transceivers to demonstrate reliable Controller Area Network communication between embedded devices.
Technical Overview
Steps:
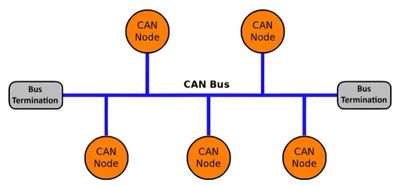
- Two Espressif Systems ESP32 microcontrollers are connected to SN65HVD230 CAN bus transceivers on a compact breadboard platform.
- The SN65HVD230 transceivers provide the physical CAN bus interface required for Controller Area Network (CAN) communication between devices.
- One ESP32 device is configured to transmit CAN data packets across the shared bus interface.
- The second ESP32 device is configured to receive and process incoming CAN bus messages in real time.
- Message transmission and reception demonstrate reliable device-to-device communication and interoperability over the CAN network.
- The breadboard prototype provides a practical demonstration of automotive and industrial communication concepts using low-cost open-source embedded hardware.
Integrated Development Environment (IDE)
The transmitter and receiver programs were both written in C++ using the Arduino IDE.
PROJECT DeTAILS
ESP32 Microcontrollers (2)

The ESP32 is a low-cost, high-performance microcontroller designed for embedded systems, IoT devices, and wireless communication applications. It features integrated Wi-Fi and Bluetooth connectivity, dual-core processing capabilities, and flexible GPIO interfaces for sensors, displays, motors, and other hardware peripherals.
SN65HVD230 CAN bus Transceivers (2)

The SN65HVD230 is a high-speed CAN bus transceiver designed for reliable communication between microcontrollers and CAN network systems. It converts standard logic-level signals into differential CAN bus signals, enabling robust data transmission in automotive, industrial, and embedded applications.
Arduino CAN Bus Transmitter
Arduino CAN Bus Transmitter
Arduino CAN Bus Transmitter
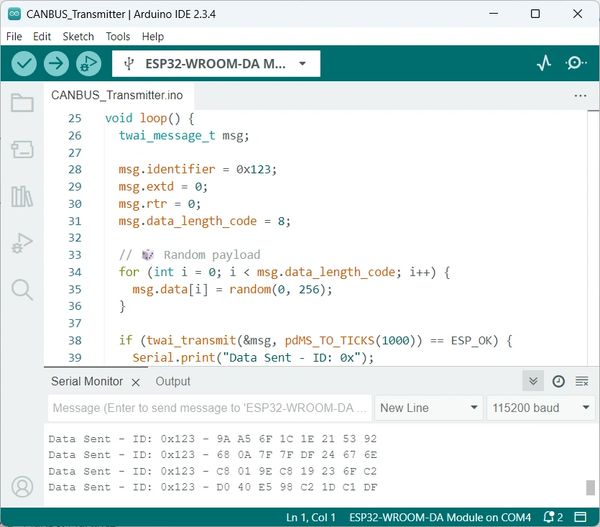
This Arduino program sends 8 random bytes of data over the CAN Bus interface every 10 seconds.
Arduino CAN Bus Receiver
Arduino CAN Bus Transmitter
Arduino CAN Bus Transmitter
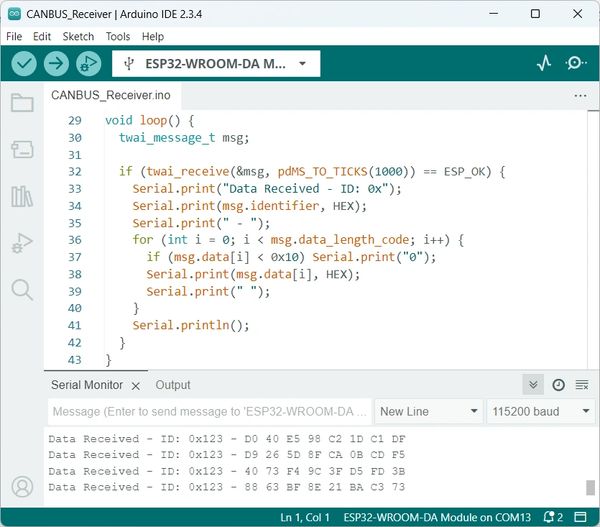
This Arduino program listens on the CAN bus interface for data packets, then prints each byte in the payload.